








新闻中心



新闻中心
智在无界与地瓜机器人达成战略合作,Being-H-Flash搭载旭日S600/S100完成世界模型首个端侧实时部署

2026.06.11
了解更多

世界模型商业化破晓,Being-H-Flash完成全球首个端侧实时部署

2026.06.04
了解更多
BeingBeyond正式发布 U1,无本体数据采集进入灵巧手时代

2026.03.18
了解更多
Being-Dex: 突破灵巧手操作落地的“最后一厘米”,仅需30分钟
2026.01.19
了解更多
BeingBeyond新突破:BumbleBee-通用人形机器人全身控制范式,
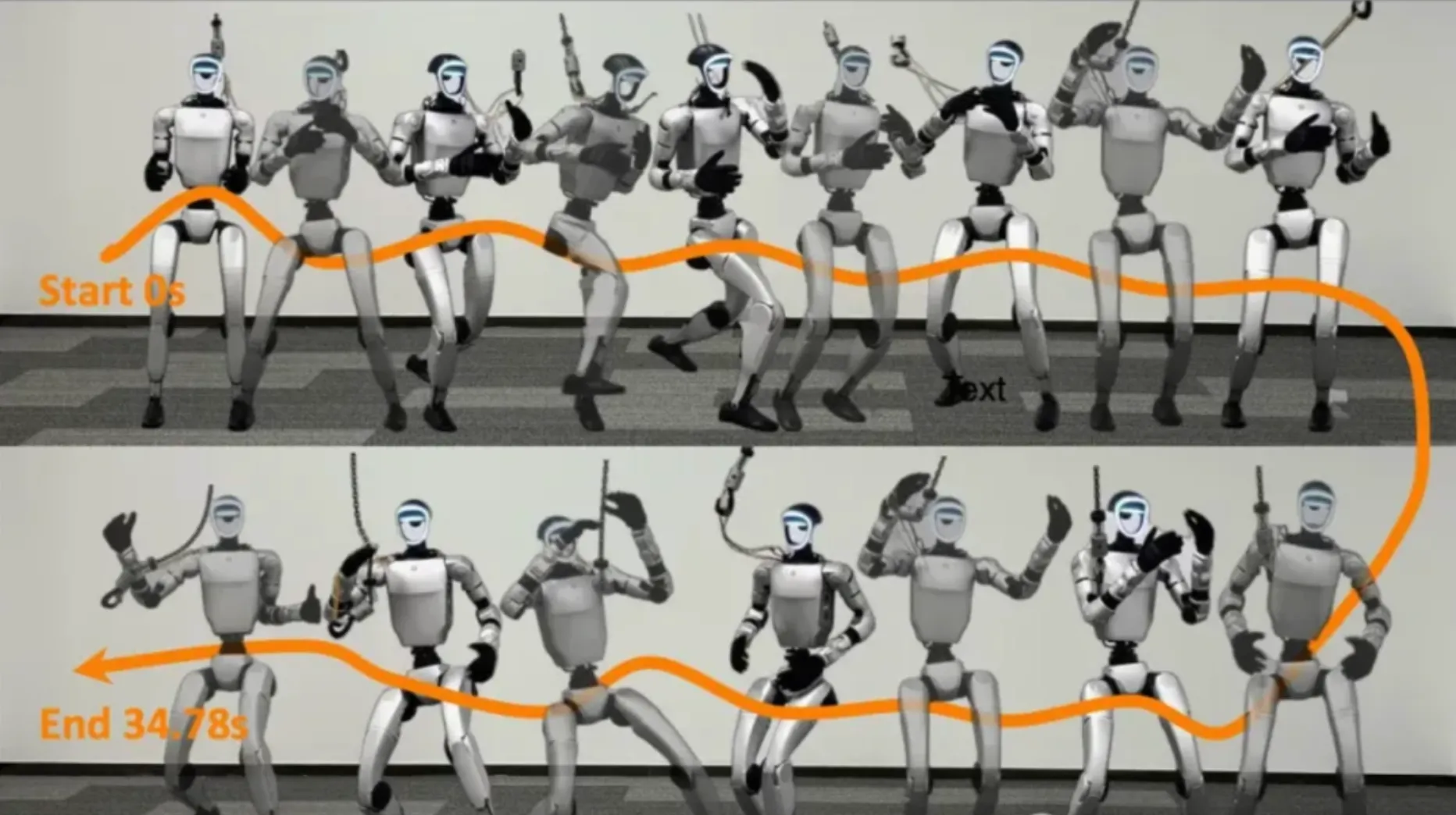
2026.01.19
了解更多
BeingBeyond最新成果:首次实现人手-机器人触觉数据迁移,直击行业痛点
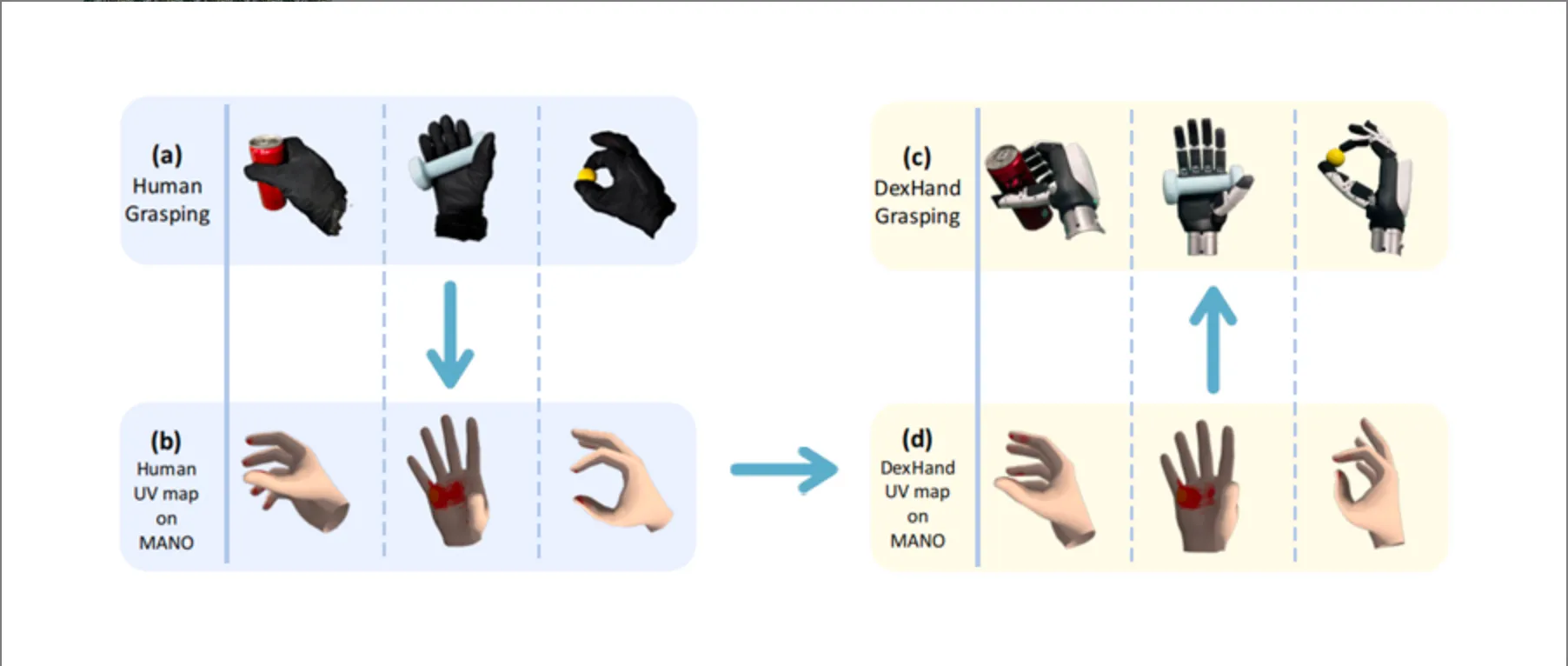
2026.01.19
了解更多
BeingBeyond最新发布:百万规模数据集,实现精细动作跨平台、跨形态动作迁移

2026.01.19
了解更多
BeingBeyond最新成果:首个利用人类操作轨迹训练的VLA-Being-H0
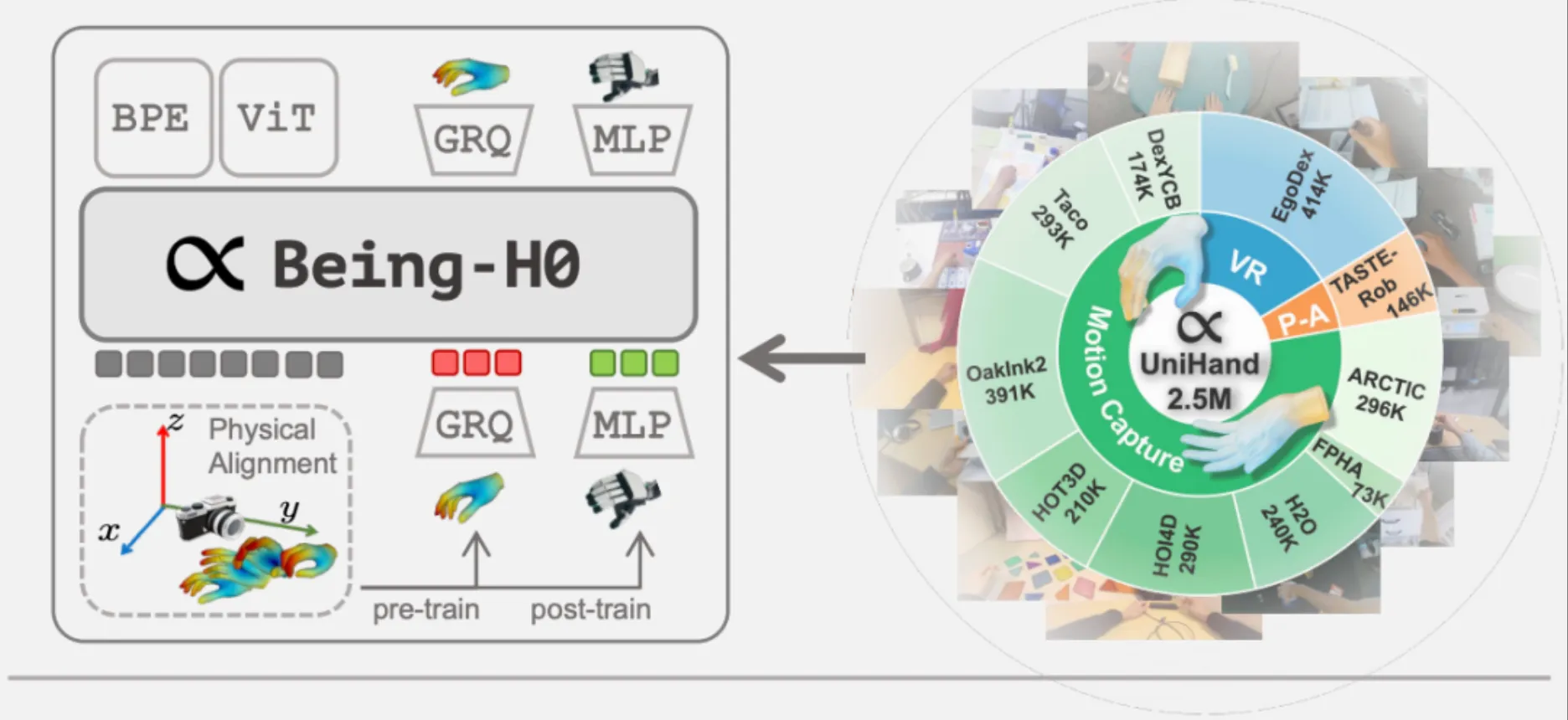
2026.01.18
了解更多
BeingBeyond出品!全球首款万元级别桌面级灵巧手机械臂

2026.01.18
了解更多







京公网安备11010802047405号


